
Swingswong
Jeg har forsøkt å montere en lineær rorgiver på piloten, men den dras til ohmske verdier som ikke er tillat i piloten. Maks 3,5k Ohm min 1,5k Ohm.
Det virker som at den krever at 2,5k Ohm er 0 grader, men det er ikke mulig å angi hvor mange grader feks 3,5k Ohm er.
Raymarine sin egen sensor skal monteres parallelt med roret. Det er ikke mulig når man har Bravo 3 drev i alle fall.
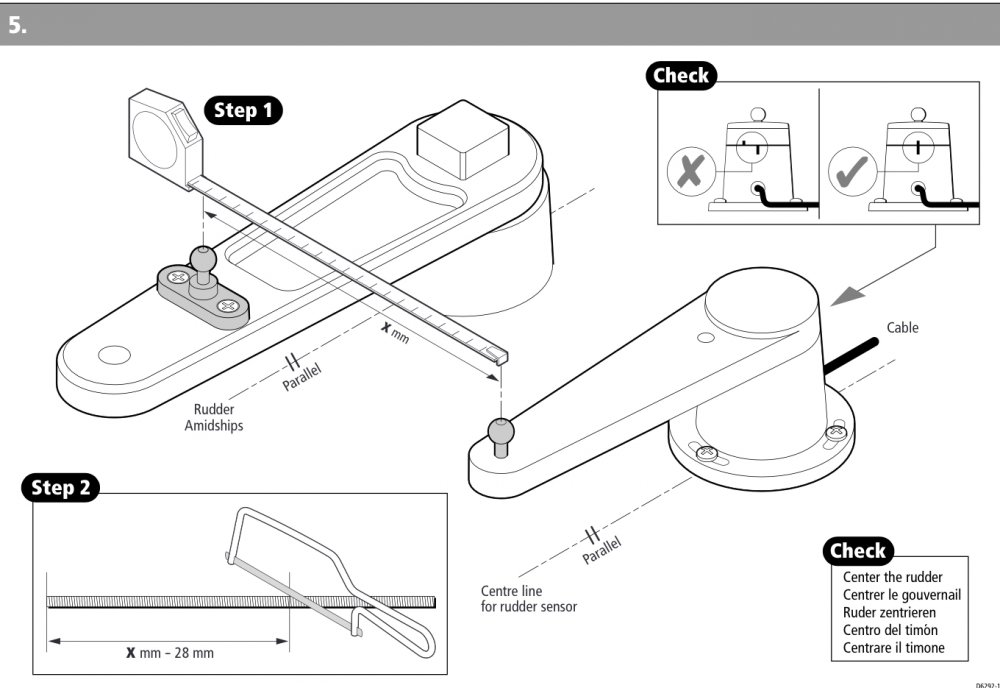
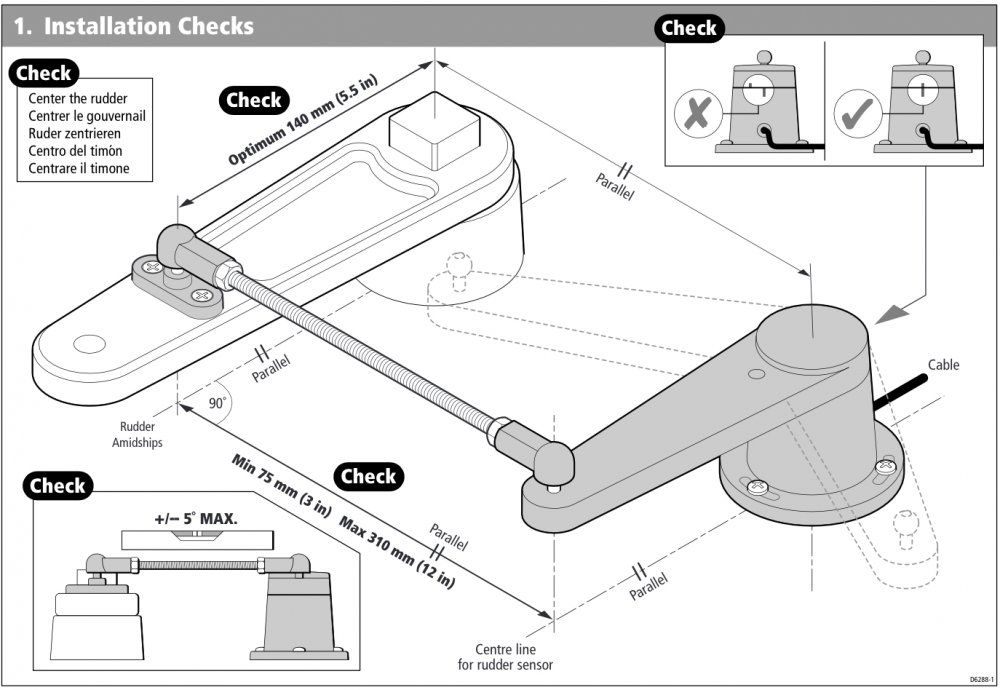
Optimal montering skal være 140mm fra senter på drevet.
Armen som går fra drevet til styresylinderen er 185mm.
Eneste måten jeg kan se at dette kan bli rett er å ha en slik sensor og forlenge armen slik at den blir 185mm og montere den mot motor andre veien, men det vil vel også bli feil da armen svinger vekk fra sensoren.
Alternativet er å bruke piloten uten sensor, men jeg synes ikke den er god nok uten.
Etter litt fikling på papir så kommer jeg til at muligens ser hvorfor.
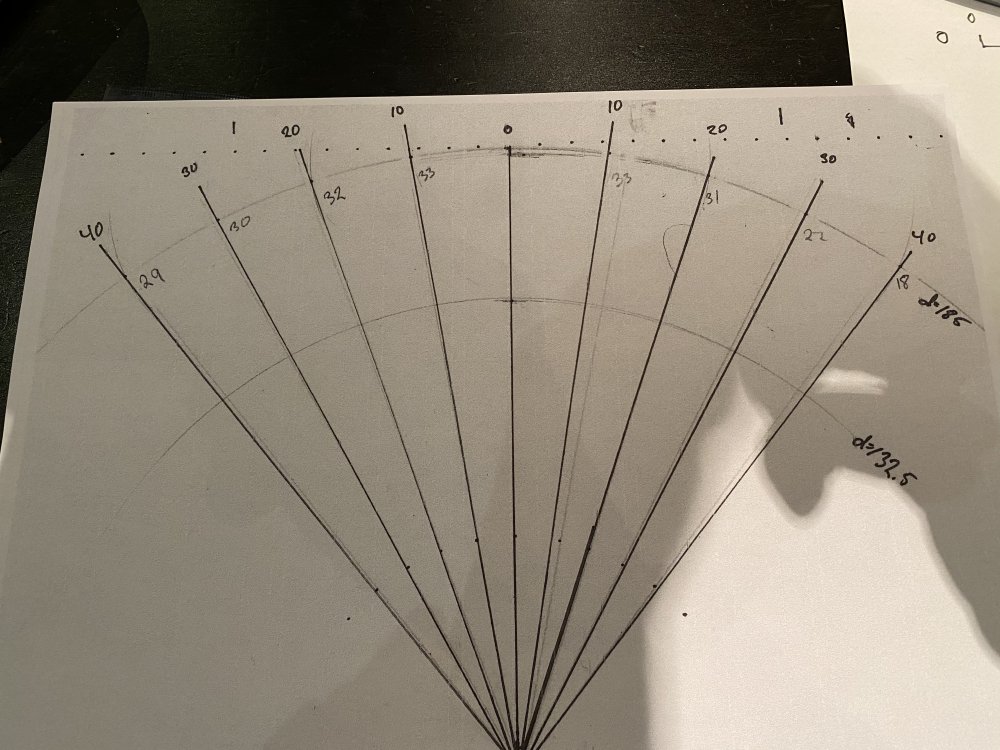
De øverste tallene er antall grader.
Tallene under er antall millimeter sylinderen må bevege seg fra 0 for å komme til det gradetallet som står over. Dvs 33mm til 10 grader + eller - og 33+32+30+29 for å komme til 40 grader styrbord.
Sylinderen som pumpen er koblet på er ikke balansert. Det vil si at volumet for å gå mot styrbord er høyere enn til babord. Noe som øker feilmarginen.
I oppsettet kan man kun velge antall grader roret kan vris og hard over time som er antall sekunder det tar pumpen å flytte roret fra en side til den andre. Det er ikke mulig å justere dette individuelt.
Når jeg kjøpte piloten skulle den klare dette fint, men jeg ser nå at mine tvil er forsterket...